modele_marche_aleatoire
Marche aléatoire.
Espace de nom : tsd::kalman
Prototype
sptr<SSMLineaire> modele_marche_aleatoire(entier ndim=1, const Tabf &Q=Tabf(), const Tabf &R=Tabf())
Paramètres
| ndim | Nombre de dimensions (1 = modèle scalaire) |
| Q | Covariance du bruit de process |
| R | Covariance du bruit d'observation |
Retourne
Modèle en représentation d'état
Description
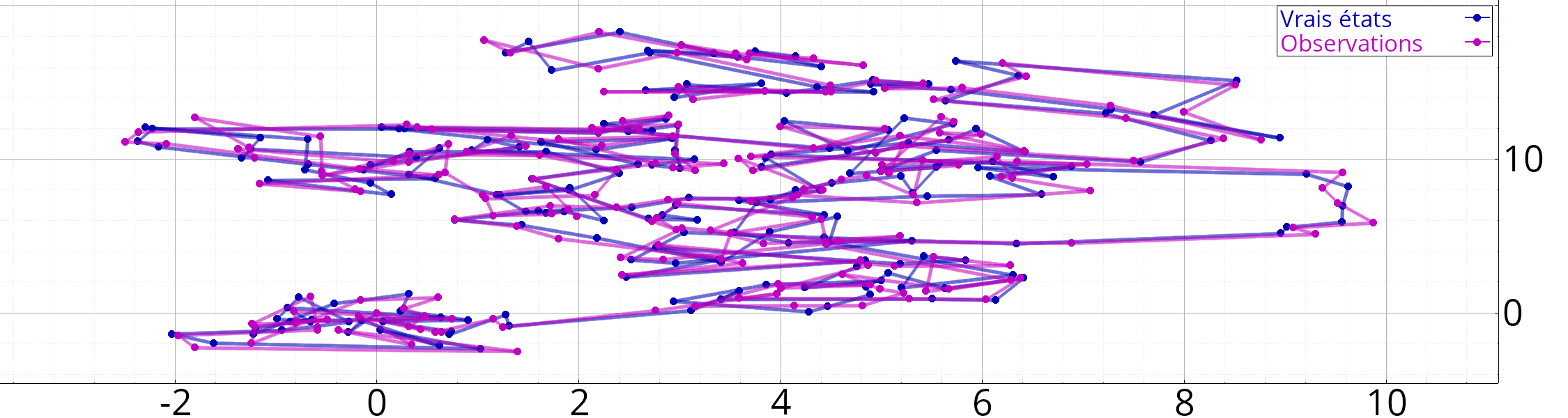
This function create a simple scalar or vectorial random walk model, e.g. at each time interval, the state is incremented by a random value, and observed through a noisy measurement. That is:
Exemple en dimension 2 :
Voir aussi
ssm_simu(), model_kitagawa(), model_imu(), model_constant()