détecteur_création
Détecteur par corrélation.
Espace de nom : tsd::fourier
Prototype
sptr<Detecteur> détecteur_création(const DetecteurConfig &config=DetecteurConfig())
Paramètres
| config | Structure de configuration |
Retourne
Filtre cfloat \(\to\) float, qui prend en entrée des échantillons, et sort, au fil de l'eau, la corrélation normalisée avec le motif.
Description
Cette fonction calcule, au fil de l'eau, la corrélation normalisée entre un signal \((x_k)\) reçu en continu et un motif fixe \((h_k)\) de dimension \(M\) :
Les \(c_n\) sont donc compris entre 0 et 1, et seront égaux à 1 uniquement si le signal est exactement égal au motif (à un facteur d'échelle constant près) sur l'intervalle \([n\dots n + M[\).
Le calcul pouvant être fait soit grâce à un filtre RIF (avec une complexité de l'ordre de \(M\) opérations / échantillon), soit de manière efficace dans le domaine fréquentiel via la technique Overlap-And-Add (bloc filtre_fft()), la complexité étant alors de l'ordre de \(\log_2(M)\) opérations par échantillon (si \(M\) est une puissance de 2).
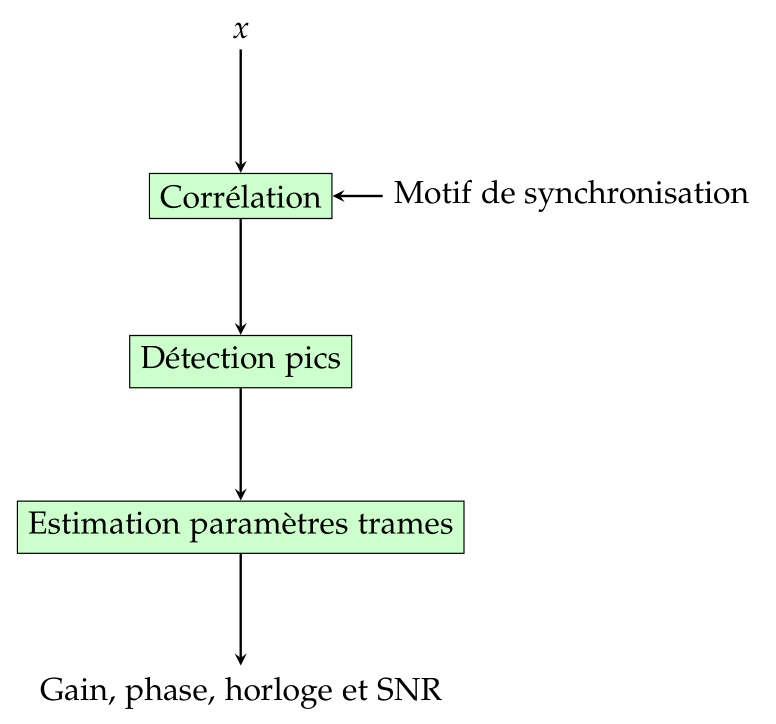
Ensuite, les pics isolés correspondant à des positions possibles de motif sont détectés. Les deux critères suivants sont vérifiés~:
- Score \(c_n\) supérieur à un seuil paramétrable,
- Absence de pic de score supérieur dans un voisinage de \(\pm\) la moitié de la durée du motif de synchronisation.
Pour chaque position possible, les paramètres suivants sont alors estimés : Gain complexe du signal (rapport complexe entre le signal reçu et le motif théorique attendu) :
Pour chaque motif détecté, une callback utilisateur est appelée, avec l'ensemble des paramètres estimés ainsi que le score de corrélation normalisé.
Schéma-bloc
Exemple
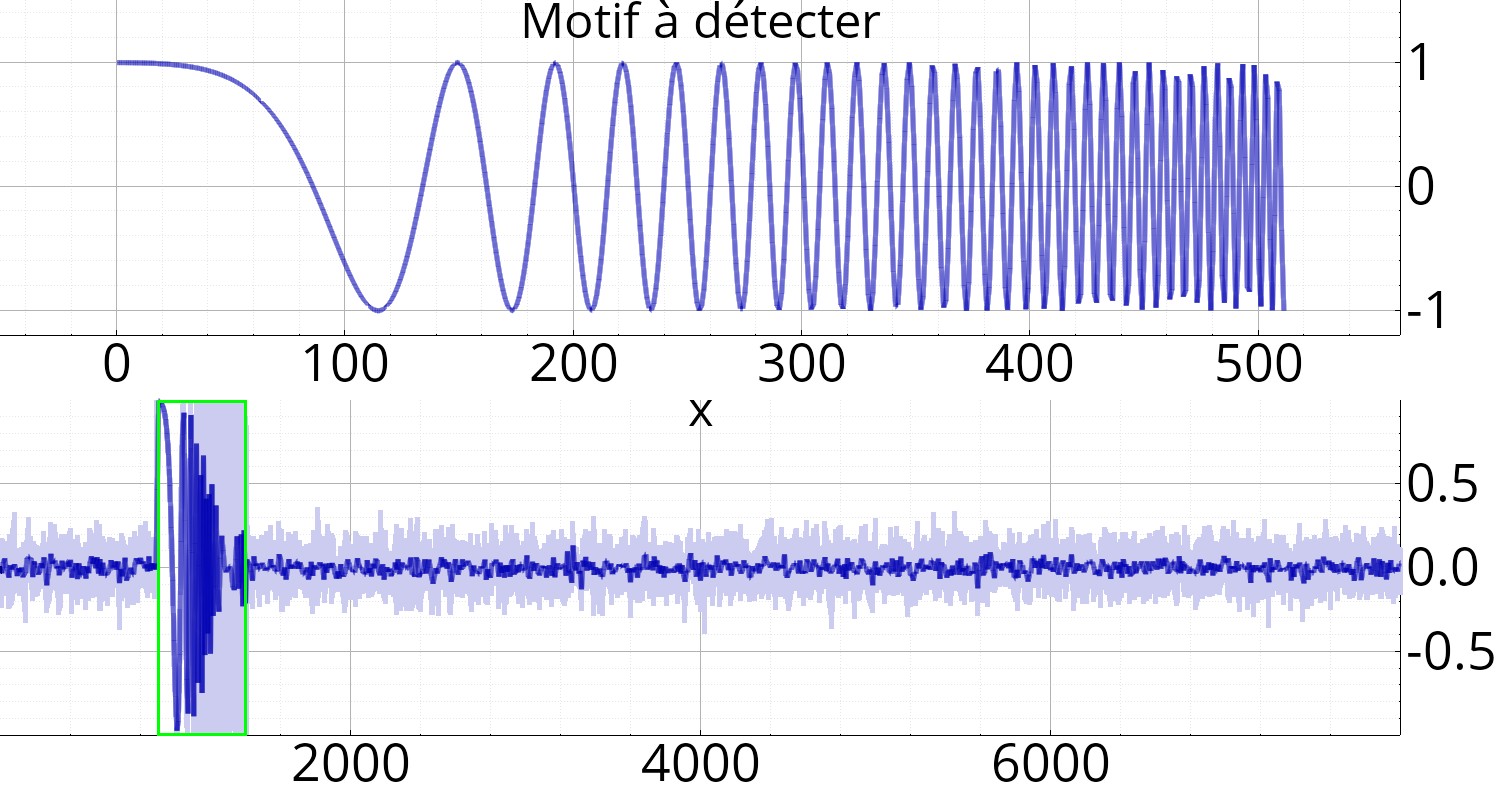
soit M = 512; // Dimension du motif soit N = 16*M; // Dimension du signal // Motif de synchronisation soit motif = sigchirp(0.001, 0.2, M, 'q' );
// Signal = bruit soit x = (0.1 * randn(N)).as<cfloat>();
// + motif à détecter au milieu x.segment(900, M) = motif;
soit pos_detection = 0;
DetecteurConfig config;
config.motif = motif;
config.Ne = M;
config.lien non trouvé : [structtsd_1_1fourier_1_1_detecteur_config_1ac6388199c133574b9aa9061ced1f407f]gere_detection = [&]( const Detection &det)
{
msg( "Detection : {}." , det);
pos_detection = det.position;
};
soit det = détecteur_création(config);
soit y = det->step(x);
Figures f;
f.subplot().plot(real(motif), "" , "Motif à détecter" );
f.subplot().plot(real(x), "" , "x" );
f.gcf().def_rdi({0, -1, 8000, 2});
f.gcf().canva().set_couleur(tsd::vue::Couleur::Vert);
f.gcf().canva().set_epaisseur(3);
f.gcf().canva().set_remplissage(non);
f.gcf().canva().rectangle(pos_detection, 1, pos_detection + M - 1, -1);