modele_constante
Le système en représentation d'état le plus simple : une valeur constante.
Espace de nom : tsd::kalman
Prototype
sptr<SSMLineaire> modele_constante(float R=0.1)
Paramètres
| R | Variance du bruit d'observation |
Retourne
Modèle linéaire
Description
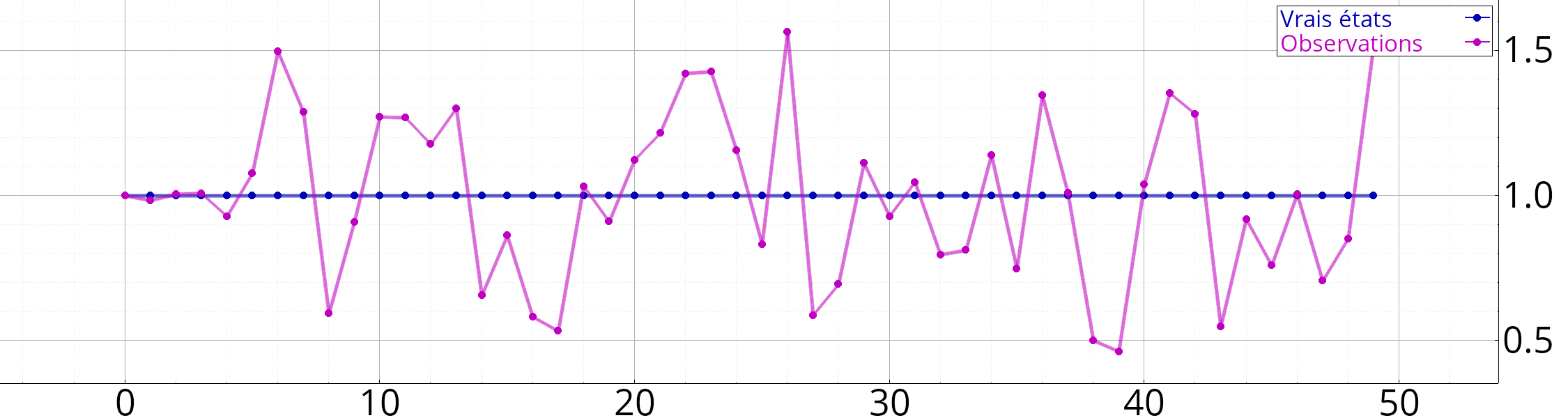
Cette fonction renvoie le système en représentation d'état le plus simple : une valeur constante, observée à travers un canal bruité, c'est-à-dire :
Exemple :